Survey Mapper

Robuuste wagen
Positiesensoren

360° camera
2 lidar scanners

Meetwagen
Teccon maakt sinds 2008 gebruik van de Survey Mapper. Dankzij verschillende upgrades is het systeem helemaal mee met de nieuwste technologische ontwikkelingen.
Geen verkeershinder
De meetwagen rijdt aan een snelheid van 30 tot 120 km/u. Hij rijdt met het verkeer mee en veroorzaakt geen verkeershinder. Tijdens de rit worden positioneringsdata, foto’s en laserdata ingewonnen.
Wegen – waterwegen – spoorwegen
De Survey Mapper is een 4×4 Mitsubishi Pajero. Hij kan niet alleen op de openbare weg worden ingezet, maar ook op het strand, een werf, een industriële site, enz. Voor de inwinning van waterwegen en spoorwegen wordt de survey mapping apparatuur geïnstalleerd op een boot of trein. Op deze manier werden door Teccon bijvoorbeeld de bevaarbare waterwegen in Vlaanderen ingewonnen.
Positiebepaling
Om de positie van het meetplatform te bepalen worden vier sensoren ingezet:
- De GNSS-sensor achteraan dient om de positie te bepalen.
- De GNSS vooraan dient om de rijrichting te detecteren.
- Het inertieel meetsysteem of IMU registreert de versnellingen en verdraaiingen van het platform.
- De wielsensor of DMI meet de afgelegde afstand.
Nauwkeurigheid
De 3D puntenwolk van de survey mapper heeft een nauwkeurigheid van 1-2 cm. De absolute positie van de puntenwolk is beter dan 5 cm bij goede GNSS ontvangst.
In urban canyons, bosgebieden en andere zones met geen of slechte GNSS ontvangst voert Teccon matching met paspunten uit om de nauwkeurigheid te verbeteren.


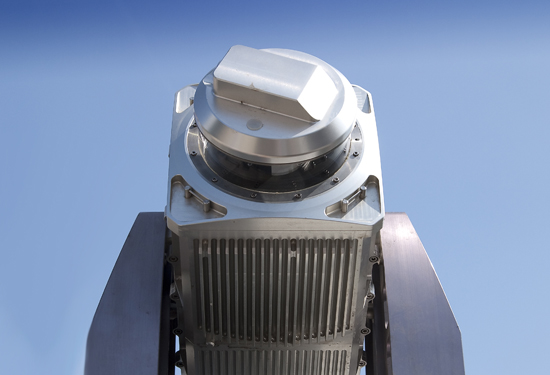
360° camera
De Survey Mapper is uitgerust met een Ladybug 5. De Ladybug 5 is een panoramische camera opgebouwd uit 6 afzonderlijke 5Mpixel camera’s van het type Sony ICX655 CCD. Vijf zijn gepositioneerd in het horizontale vlak en één bovenaan.
De 360° camera neemt gegeorefereerde panoramafoto´s van het type streetview. De afstand tussen twee panoramafoto’s is instelbaar. Doorgaans wordt tijdens het rijden elke 5 meter een foto gemaakt.
De 360° beelden zijn nuttig om het traject te visualiseren en om objecten snel terug te vinden en te meten.
2 Lidar scanners
Beide lasers scannen een vlak over 360° waarbij zowel de plaatsen onder, naast als boven de wagen worden opgenomen. De lasers staan zo opgesteld dat elk object dat zich op het afgelegde traject bevindt zowel langs de voorkant als langs de zijdes wordt gescand. Van een vrijstaande woning worden op deze manier de voorgevel en de twee zijgevels gescand. Occlusies worden door deze opstelling zoveel mogelijk vermeden.
Elke uitgaande laserpuls kan tot vier keer gereflecteerd worden. Dit kan resulteren in vier effectieve meetpunten. Elke reflectie bevat een waaier aan informatie. Waaronder bv. de intensiteitwaarde die gebruikt wordt voor de kartering van wegmarkering.
De laserdata wordt verwerkt tot een gegeorefereerde 3D puntenwolk. De panoramafoto’s worden gebruikt om de puntenwolk te kleuren.