Système de cartographie mobile

Voiture robuste
Capteurs de position

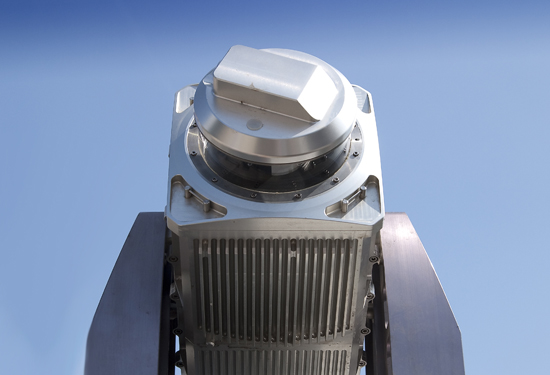
Caméra 360°
Le système de cartographie mobile est équipé d’une Ladybug 5. Cette caméra à 360° réalise des images panoramiques haute résolution (32 Mpixel) avec un angle de 90 % d’une sphère complète.
2 scanners lidar

Véhicule de mesure
Teccon utilise le système de cartographie mobile depuis 2008. Grâce à différentes mises à niveau, le système est tout à fait à la pointe de l’évolution technologique.
Pas d’entrave à la circulation
Le véhicule de mesure circule à une vitesse comprise entre 30 et 120 km/h. Il roule dans le trafic et ne gêne nullement ce dernier. Les données de positionnement, photos et données laser sont acquises pendant le trajet.
Routes – cours d’eau – voies ferrées
Le système de cartographie mobile est un 4×4 Mitsubishi Pajero. Le véhicule peut être déployé sur la route, mais aussi sur la plage, un chantier, un site industriel, etc. Pour l’acquisition de voies navigables ou de voies ferrées, Système de cartographie mobile est installé à bord d’un bateau ou d’un train. Teccon peut ainsi acquérir par exemple les voies d’eau navigables de Flandre.
Détermination de la position
Quatre capteurs sont utilisés pour déterminer la position de la plate-forme de mesure :
- Le capteur GNSS situé à l’arrière permet de déterminer la position.
- Le capteur GNSS situé devant sert à détecter la direction d’avancée.
- Le système de mesure inertiel (IMU) enregistre les accélérations et les déplacements.
- Le capteur de roue (DMI) mesure la distance parcourue.
Précision
Le nuage de points 3D du système de cartographie mobile offre une précision de 1-2 cm. La position absolue du nuage de points est supérieure à 5 cm lorsque la réception GNSS est bonne.
Dans les canyons urbains, les zones boisées et les autres zones où la réception GNSS est mauvaise ou nulle, Teccon effectue un alignement avec des points d’équivalence pour améliorer la précision.


Caméra 360°
Le système de cartographie mobile est équipé d’une Ladybug 5. La Ladybug 5 est une caméra panoramique constituée de six caméras 5 Mpixel séparées de type Sony ICX655 CCD. Cinq sont positionnées dans le plan horizontal, la sixième étant placée au-dessus.
La caméra 360° prend des photos panoramiques géoréférencées de type streetview. La distance entre ces deux photos panoramiques peut être réglée. Une photo est généralement prise tous les cinq mètres sur le trajet.
Les images à 360° sont utiles pour visualiser le trajet et retrouver et mesurer rapidement des objets.
2 scanners lidar
Les deux lasers balayent une surface de 360°, enregistrant à la fois en dessous, à côté et au-dessus de la voiture. Les lasers sont disposés de telle sorte que chaque objet se trouvant le long du parcours est scanné par l’avant et sur les côtés. Cette méthode permet de scanner la façade avant et les deux façades latérales d’une habitation à quatre façades. Cette configuration évite dans la mesure du possible les occlusions.
Chaque impulsion laser émise peut être réfléchie jusqu’à quatre fois. Cela peut se traduire par quatre points de mesure effectifs. Chaque réflexion contient tout un éventail d’informations. On y trouve notamment la valeur d’intensité qui est utilisée pour cartographier les marquages routiers.
Les données laser sont transformées en un nuage de points 3D géoréférencé. Les photos panoramiques sont utilisées pour colorer le nuage de points.